










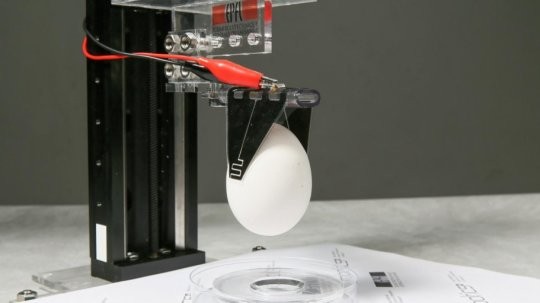
瑞士洛桑联邦理工学院(EPFL)的科学家利用静电粘性原理发明了一种新型柔性机器人夹具:可以拿起任意形状以及任何硬度的易碎物体,比如像一个鸡蛋或是一张纸或水球。
这种轻型夹具将可以很快用于食品行业处理食品、用于外太空采集碎片、或用于假肢。该项研究由NCCR机器人赞助,在《先进材料》杂志中有过报道。
这是首次将静电粘性与柔性机器人技术相结合。
当电压被接通,电极就会向要被拿起的物体弯曲,如同人类的肌肉那样吸附到被拿取的物体上。可利用静电的吸附力量牢牢抓住物品。而这些抓取物相当于其自身重量的80倍,并且完全不用事前提前了解物体的形状。
软性夹具的新颖之处就在于结合了人造肌肉和静电粘性这两项技术。电极和硅胶膜独特的配置可让研发人员控制皮瓣弯曲度和静电抓取。
(来源:OFweek机器人网)机器人365
